AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
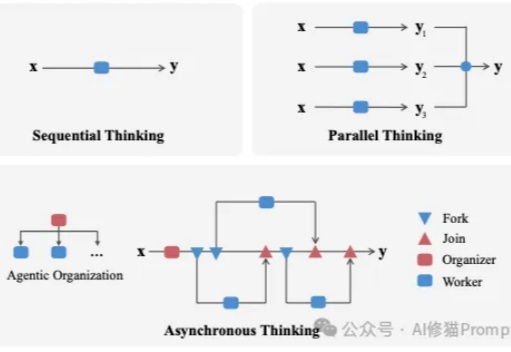
让LLM像公司一样干活:微软把“思维并发”做成了协议,准确率更高、关键路径时延降28%
让LLM像公司一样干活:微软把“思维并发”做成了协议,准确率更高、关键路径时延降28%
9766
AI技术研报
NeurIPS 25开新坑:145万个图文对,覆盖八种主流水下理解任务
NeurIPS 25开新坑:145万个图文对,覆盖八种主流水下理解任务
11605
AI技术研报
阿里发了个简历AI神器,大小仅0.6B
阿里发了个简历AI神器,大小仅0.6B
10599
AI技术研报
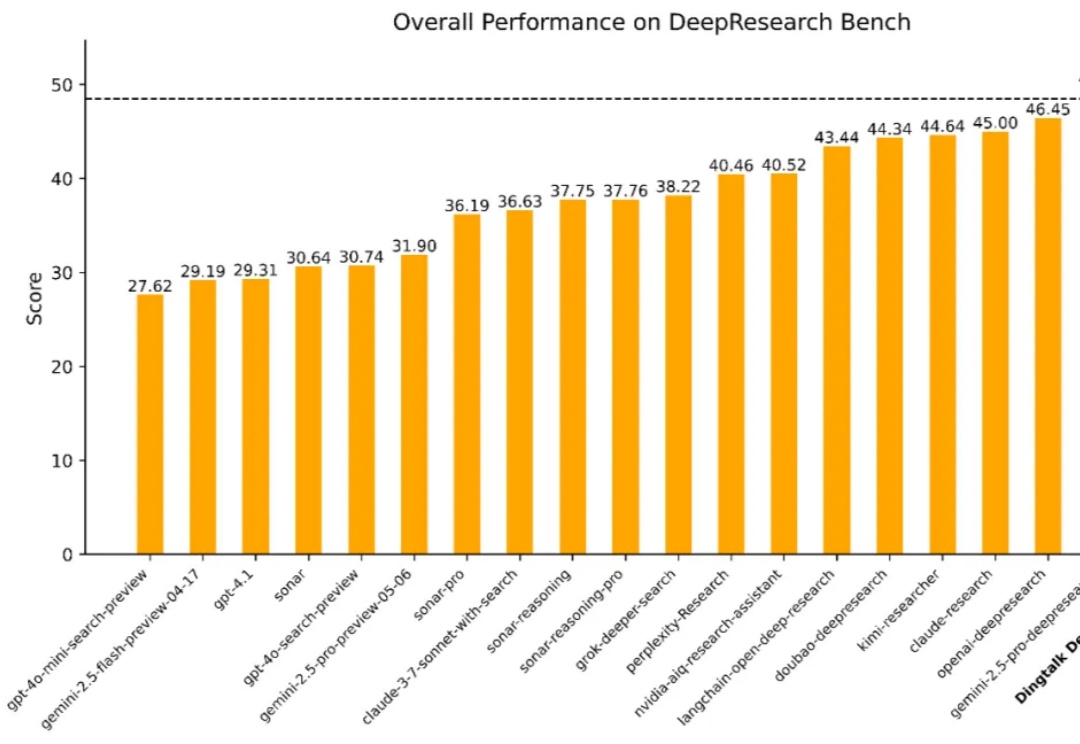
全球第二、国内第一!钉钉发布DeepResearch多智能体框架,已在真实企业部署
全球第二、国内第一!钉钉发布DeepResearch多智能体框架,已在真实企业部署
8603
AI技术研报
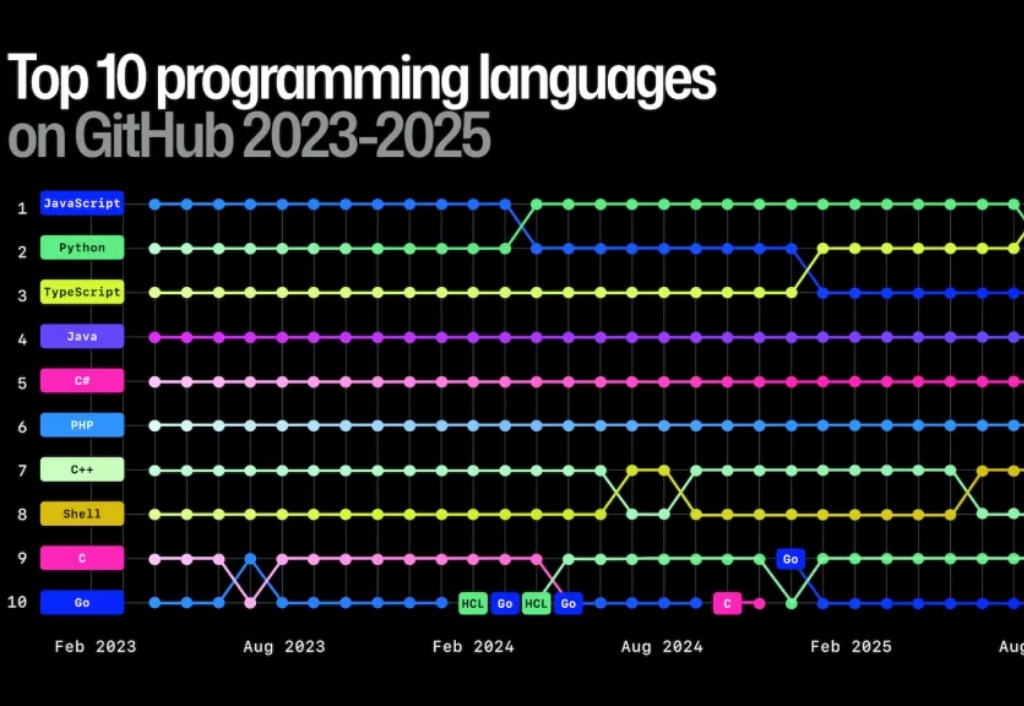
TypeScript超越Python成GitHub上使用最广语言,AI是主要驱动力
TypeScript超越Python成GitHub上使用最广语言,AI是主要驱动力
9916
AI技术研报
Nature子刊:太空中建数据中心,无限能源,浙大首次证实可行!
Nature子刊:太空中建数据中心,无限能源,浙大首次证实可行!
10527
AI技术研报
《麦肯锡2025 AI报告》|附下载
《麦肯锡2025 AI报告》|附下载
9819
AI技术研报
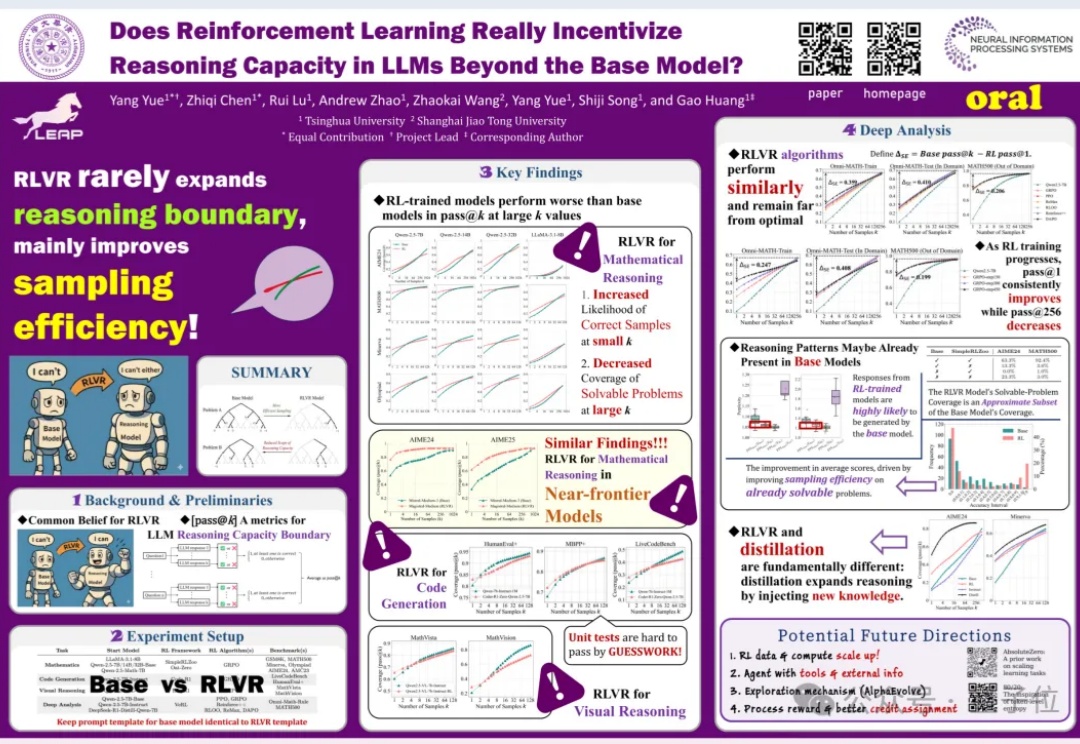
6666!NeurIPS满分论文来了
6666!NeurIPS满分论文来了
11565
AI技术研报
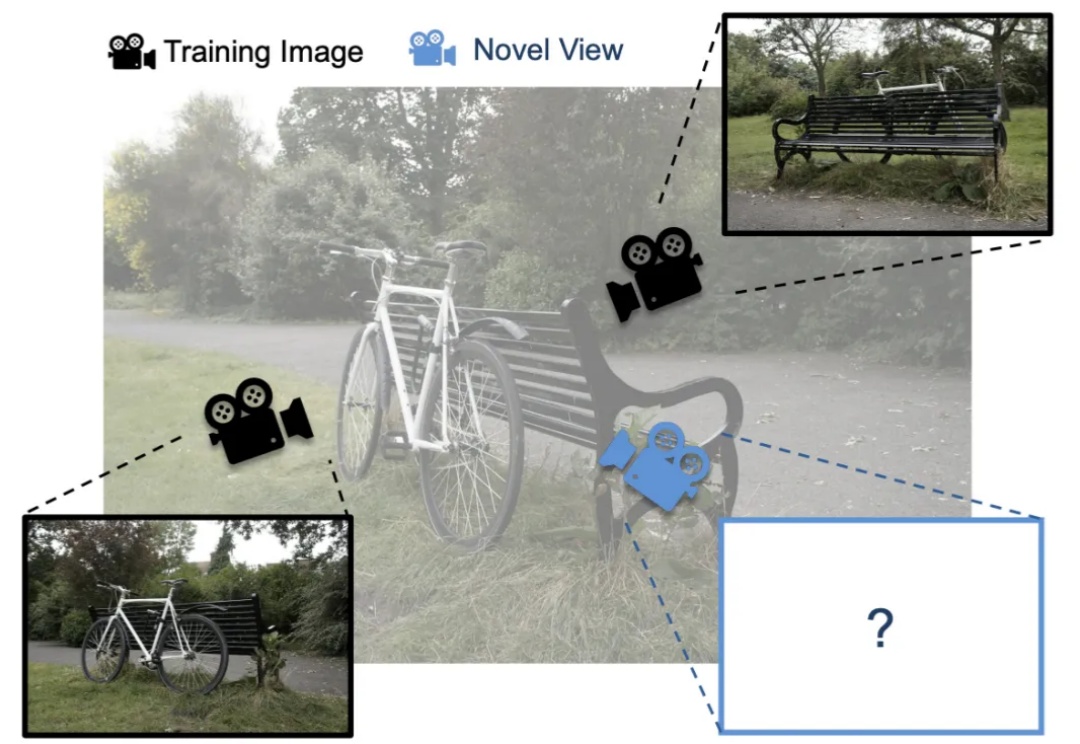
打破显存墙:谢赛宁团队提出CLM,单卡RTX 4090「撬动」1亿高斯点
打破显存墙:谢赛宁团队提出CLM,单卡RTX 4090「撬动」1亿高斯点
12271
AI技术研报
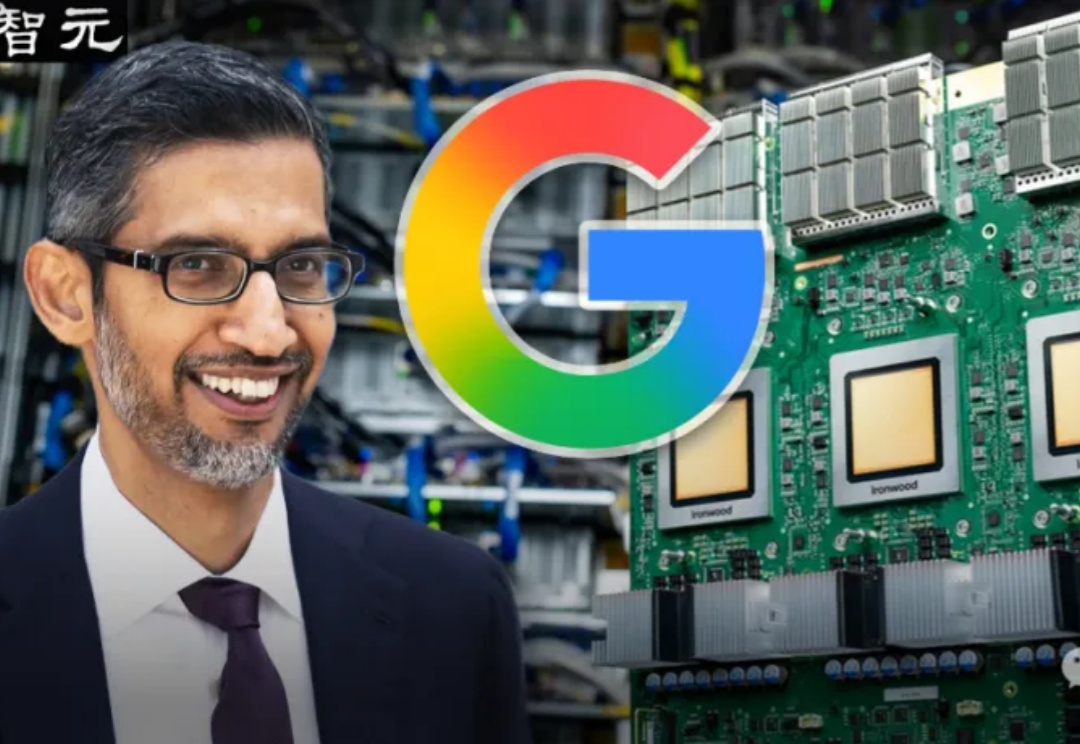
英伟达铁幕之后,谷歌AI芯片已成气候
英伟达铁幕之后,谷歌AI芯片已成气候
7883
AI技术研报
上一页
当前第195页,共682页
下一页
沪ICP备2023015588号