AI技术研报-这里有最前沿的人工智能技术解读
首页
AI资讯
AI技术研报
AI监管政策
AI产品测评
AI商业项目
arena全球大模型排行榜
AI产品热榜
AI 源力市场
AI新闻日报
# 热门搜索 #
大模型
人工智能
openai
融资
chatGPT
清空
确定
下载 APP
下载 AITNT APP
🍎 iOS 下载
🤖 Android 下载
验证码登录
×
发送
登录即代表您已同意AITNT
用户协议
和
隐私政策
登录
登录成功后会自动刷新界面
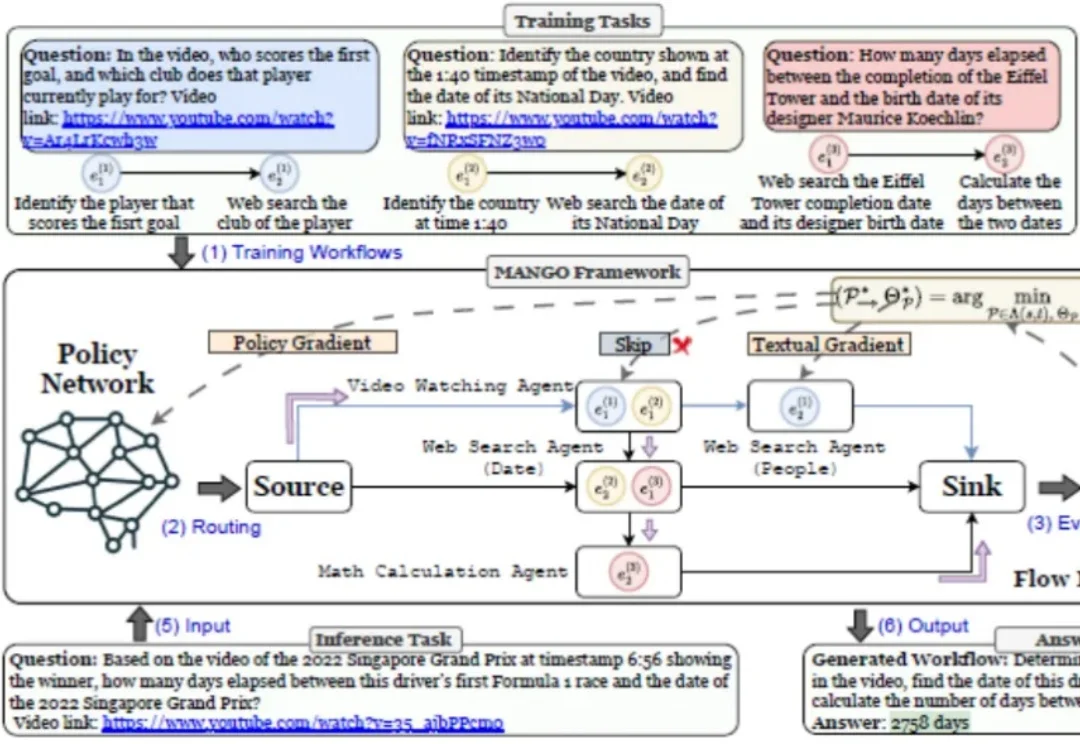
解锁Agent Swarm新潜力,openJiuwen又一力作:多智能体流网络
解锁Agent Swarm新潜力,openJiuwen又一力作:多智能体流网络
10319
AI技术研报
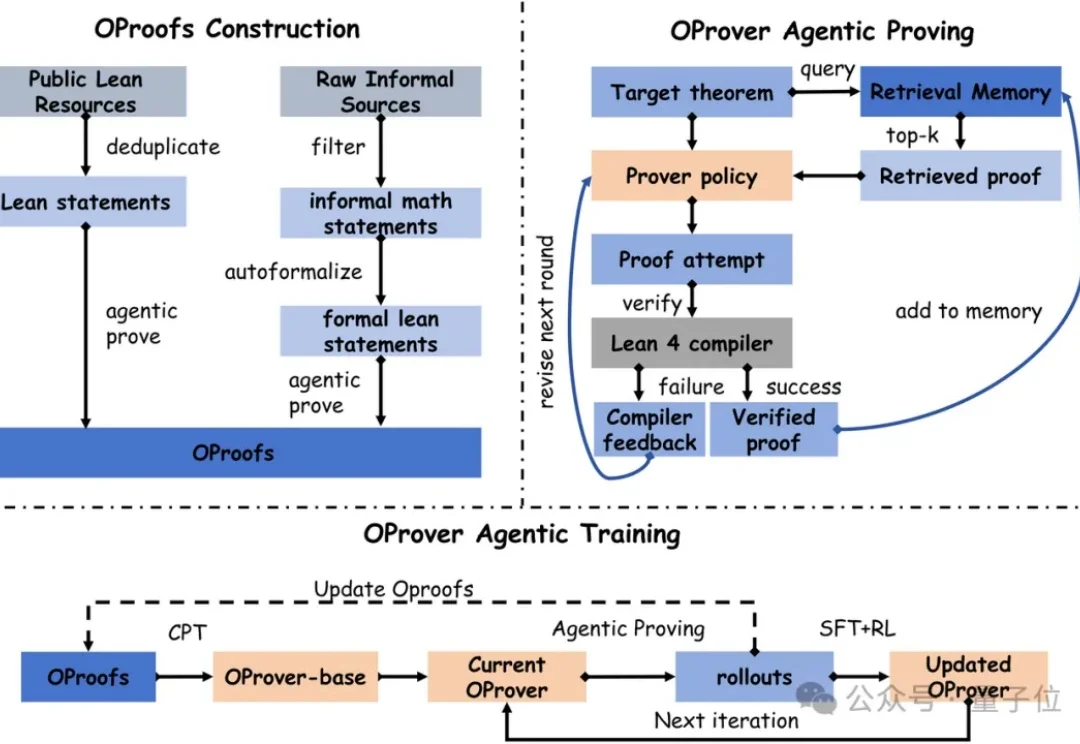
32B超越671B!M-A-P全开源数学定理证明模型OProver,五项评测三项第一
32B超越671B!M-A-P全开源数学定理证明模型OProver,五项评测三项第一
7765
AI技术研报
Coding Agent 技术全景图:Context Engineering、Subagents 与 Harness,一年范式转移全解析
Coding Agent 技术全景图:Context Engineering、Subagents 与 Harness,一年范式转移全解析
7096
AI技术研报
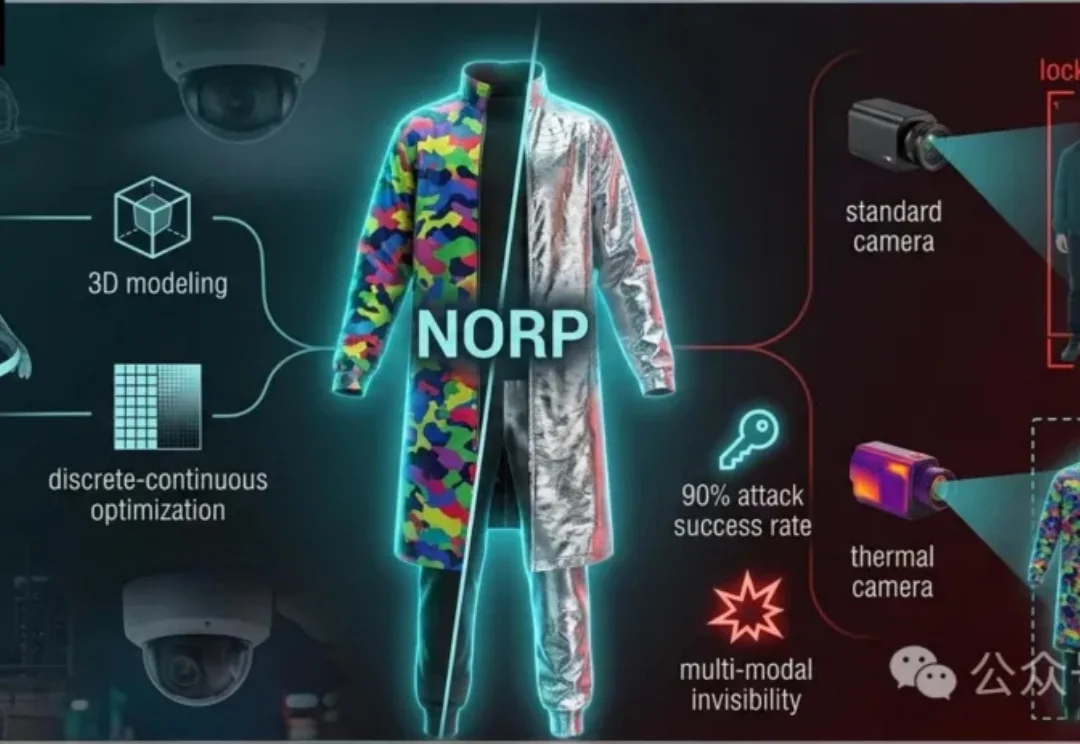
一件衣服「隐身」可见光-热成像检测器,清华多模态对抗新方法
一件衣服「隐身」可见光-热成像检测器,清华多模态对抗新方法
8053
AI技术研报
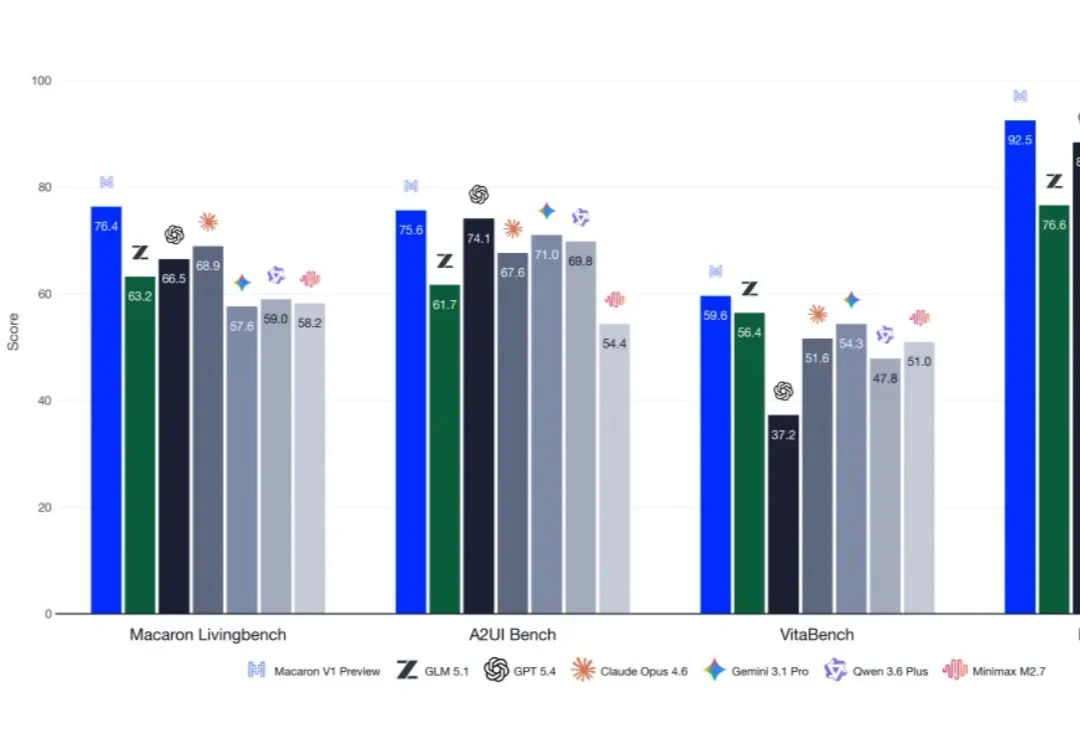
刚刚,Mind Lab开源V1系列模型Preview,749B参数,专为Agent 后训练
刚刚,Mind Lab开源V1系列模型Preview,749B参数,专为Agent 后训练
6728
AI技术研报
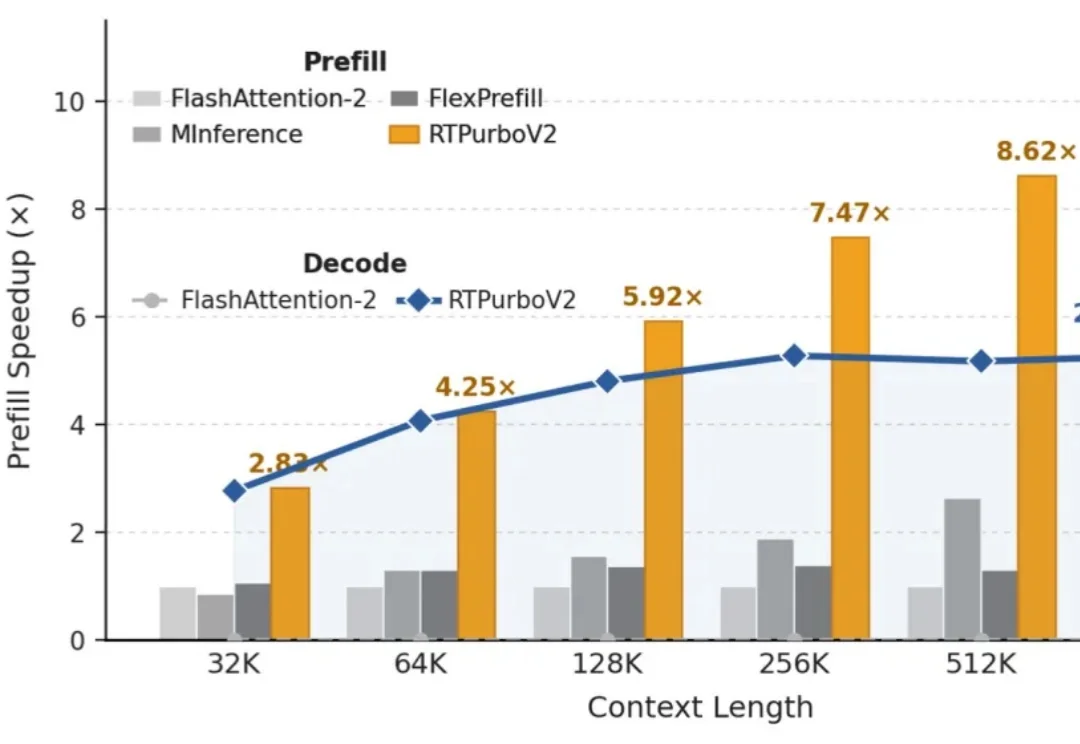
阿里RTPurboV2:原生Transformer再次崛起,百步训练实现10倍稀疏注意
阿里RTPurboV2:原生Transformer再次崛起,百步训练实现10倍稀疏注意
8552
AI技术研报
英伟达重新定义文生图最后一步:潜在表征直达4K,高精细节一步生成!
英伟达重新定义文生图最后一步:潜在表征直达4K,高精细节一步生成!
9172
AI技术研报
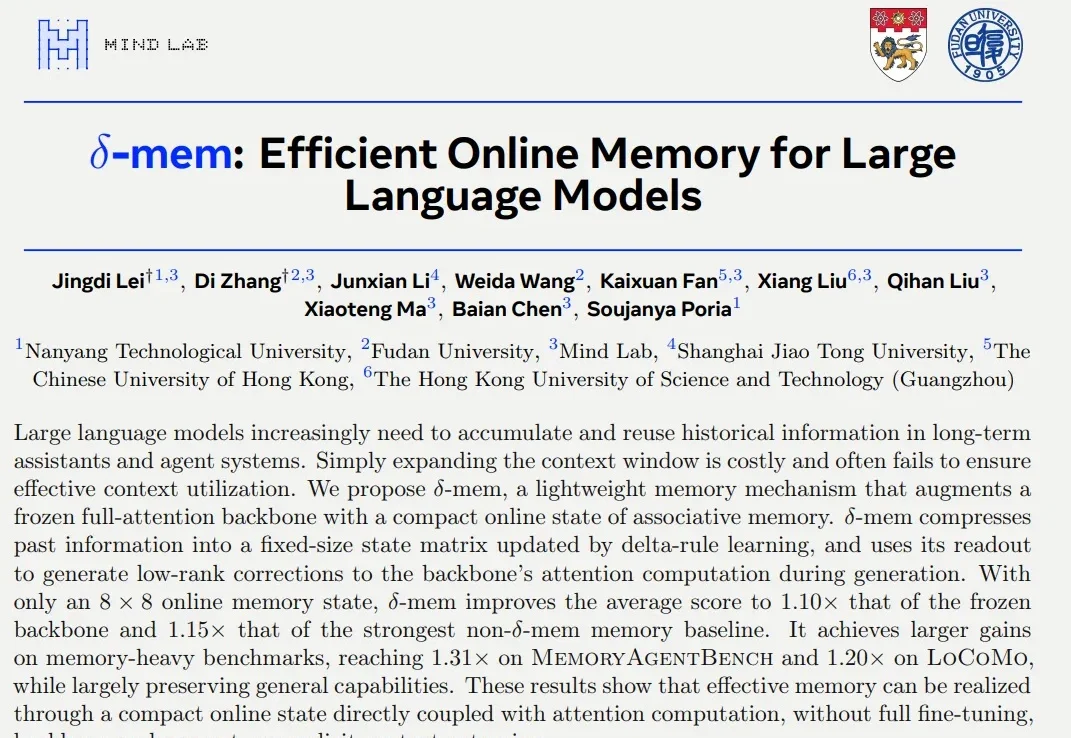
一个8×8矩阵,让大模型「记住」长对话:Mind Lab联合NTU、复旦推出δ-mem,参数仅0.12%
一个8×8矩阵,让大模型「记住」长对话:Mind Lab联合NTU、复旦推出δ-mem,参数仅0.12%
10440
AI技术研报
北大港大:大模型发现了人类从未想到的纳什均衡算法
北大港大:大模型发现了人类从未想到的纳什均衡算法
8595
AI技术研报
废片也能变大片!北大开源首个「美学照片重构」模型 | ICML'26
废片也能变大片!北大开源首个「美学照片重构」模型 | ICML'26
10531
AI技术研报
上一页
当前第26页,共677页
下一页
沪ICP备2023015588号